挑战
你现在已经准备好面对挑战了!您的任务是实现我在本章开头向您展示的应用程序。
这里是GIF图:

此外,这可能有助于:
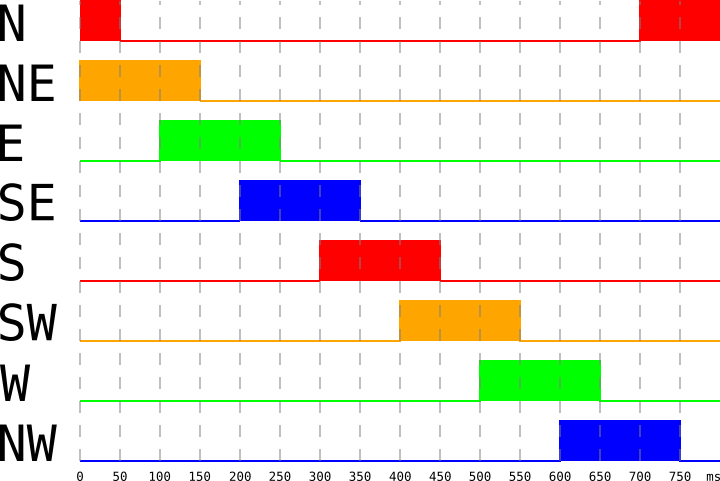
这是一个时序图。它指示哪个LED在任何给定的时间点点亮,以及每个LED应该点亮多长时间。在X轴上,我们以毫秒为单位显示时间。
时序图显示了单个周期。这种模式将每800毫秒重复一次。Y轴用一个基点标记每个LED:北、东等。
作为挑战的一部分,您必须弄清楚Leds阵列中的每个元素如何映射到这些基点 (提示:cargo doc --open ;-))。
在你尝试这个挑战之前,让我给你一个额外的提示。我们的GDB会话总是在开始时输入相同的命令。
我们可以在gdb启动后立即使用.gdb文件执行一些命令。通过这种方式,您可以省去在每个GDB会话中手动输入它们的工作量。
事实证明,我们已经创建了../openocd.gdb,您可以看到它的功能与我们在上一节中所做的差不多,外加一些其他命令。查看评论以了解更多信息:
$ cat ../openocd.gdb
# Connect to gdb remote server
target remote :3333
# Load will flash the code
load
# Eanble demangling asm names on disassembly
set print asm-demangle on
# Enable pretty printing
set print pretty on
# Disable style sources as the default colors can be hard to read
set style sources off
# Initialize monitoring so iprintln! macro output
# is sent from the itm port to itm.txt
monitor tpiu config internal itm.txt uart off 8000000
# Turn on the itm port
monitor itm port 0 on
# Set a breakpoint at main, aka entry
break main
# Set a breakpiont at DefaultHandler
break DefaultHandler
# Set a breakpiont at HardFault
break HardFault
# Continue running and until we hit the main breakpoint
continue
# Step from the trampoline code in entry into main
step
现在,我们需要修改../.cargo/config.toml要执行的文件../openocd.gdb
nano ../.cargo/config.toml
编辑runner命令 -x ../openocd.gdb。假设您使用的是arm-none-eabi-gdb,不同的是:
~/embedded-discovery/src/05-led-roulette
$ git diff ../.cargo/config.toml
diff --git a/src/.cargo/config.toml b/src/.cargo/config.toml
index ddff17f..02ac952 100644
--- a/src/.cargo/config.toml
+++ b/src/.cargo/config.toml
@@ -1,5 +1,5 @@
[target.thumbv7em-none-eabihf]
-runner = "arm-none-eabi-gdb -q"
+runner = "arm-none-eabi-gdb -q -x ../openocd.gdb"
# runner = "gdb-multiarch -q"
# runner = "gdb -q"
rustflags = [
../.cargo/config.toml的全部内容。再次假设arm-none-eabi-gdb,是:
[target.thumbv7em-none-eabihf]
runner = "arm-none-eabi-gdb -q -x ../openocd.gdb"
# runner = "gdb-multiarch -q"
# runner = "gdb -q"
rustflags = [
"-C", "link-arg=-Tlink.x",
]
[build]
target = "thumbv7em-none-eabihf"
有了这些,您现在可以使用一个简单的cargo run 命令,该命令将构建ARM版本的代码并运行gdb会话。
gdb会话将自动刷新程序,并在进入step时跳转到main的开头:
cargo run
~/embedded-discovery/src/05-led-roulette (Update-05-led-roulette-WIP)
$ cargo run
Finished dev [unoptimized + debuginfo] target(s) in 0.01s
Running `arm-none-eabi-gdb -q -x openocd.gdb ~/embedded-discovery/target/thumbv7em-none-eabihf/debug/led-roulette`
Reading symbols from ~/embedded-discovery/target/thumbv7em-none-eabihf/debug/led-roulette...
led_roulette::__cortex_m_rt_main_trampoline () at ~/embedded-discovery/src/05-led-roulette/src/main.rs:7
7 #[entry]
Loading section .vector_table, size 0x194 lma 0x8000000
Loading section .text, size 0x52c0 lma 0x8000194
Loading section .rodata, size 0xb50 lma 0x8005454
Start address 0x08000194, load size 24484
Transfer rate: 21 KB/sec, 6121 bytes/write.
Breakpoint 1 at 0x8000202: file ~/embedded-discovery/src/05-led-roulette/src/main.rs, line 7.
Note: automatically using hardware breakpoints for read-only addresses.
Breakpoint 1, led_roulette::__cortex_m_rt_main_trampoline ()
at ~/embedded-discovery/src/05-led-roulette/src/main.rs:7
7 #[entry]
led_roulette::__cortex_m_rt_main () at ~/embedded-discovery/src/05-led-roulette/src/main.rs:9
9 let (mut delay, mut leds): (Delay, LedArray) = aux5::init();
Fork the discovery book
如果您还没有准备好,最好将embedded discovery book进行fork,这样您就可以将更改保存在自己的fork中。
我们建议创建自己的分支,并单独保留master分支,这样您的fork的master分支就可以与上游 保持同步。
此外,它可以让您更轻松地创建PR并改进本书,提前感谢!